Document AI
Machine Learning, Backend Development, Python
2024 (11 months)
1
Reven AI
Worked in a Canadian startup developing smart solutions to improve healthcare admin processes.
 Backend:
Backend:
It achieves an accuracy of over 85% on client documents, significantly improving from the previous version's ~60% and surpassing general-purpose models like GPT-4o, which performs at around ~75%.
The AI engine processing time for a single page file is about ~6s, with ~4s for each additional page. End-to-end processing time (from file upload to seeing output on UI), is about ~10s for a single page file.
Overview
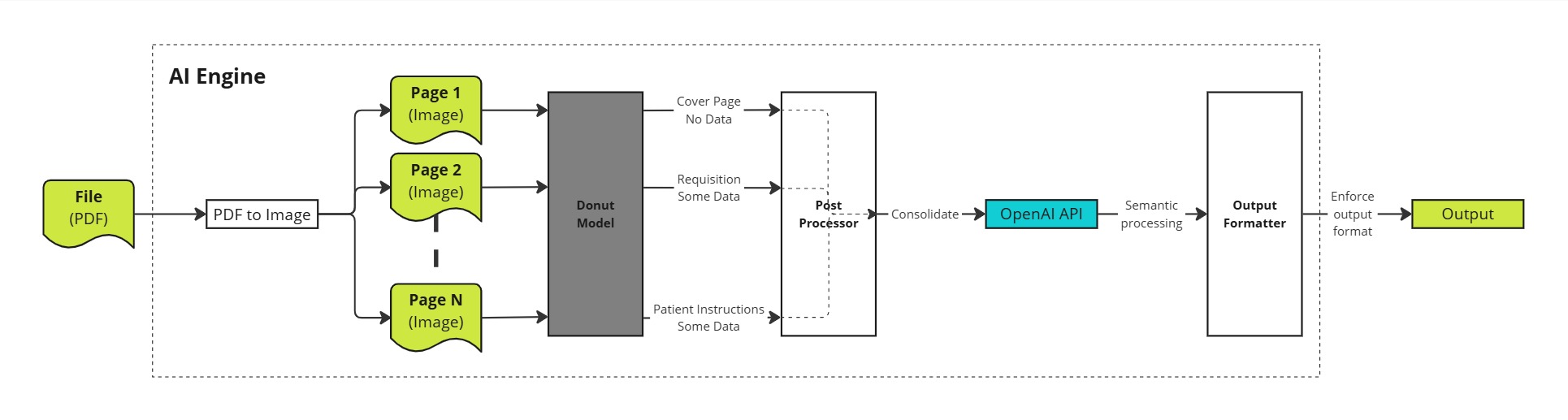
Developed a Document AI engine to extract information from medical documents, simplifying tasks for healthcare staff. The engine includes a multimodal transformer (image-encoder decoder model) for visual extraction and post-processoring using OpenAI API for cleaning, validation, and reformatting.Contributions
- Design and implement entire AI engine system in Python
- Label datasets
- Train model on AWS EC2
- Develop evaluation procedure for engine performance
- Develop post processing, including integration with OpenAI API
- Develop procedure for detecting duplicate files
- Deploy AI engine & backend on AWS (EC2, SQS, S3, Lambda, DynamoDB)
System Diagrams
AI Engine:
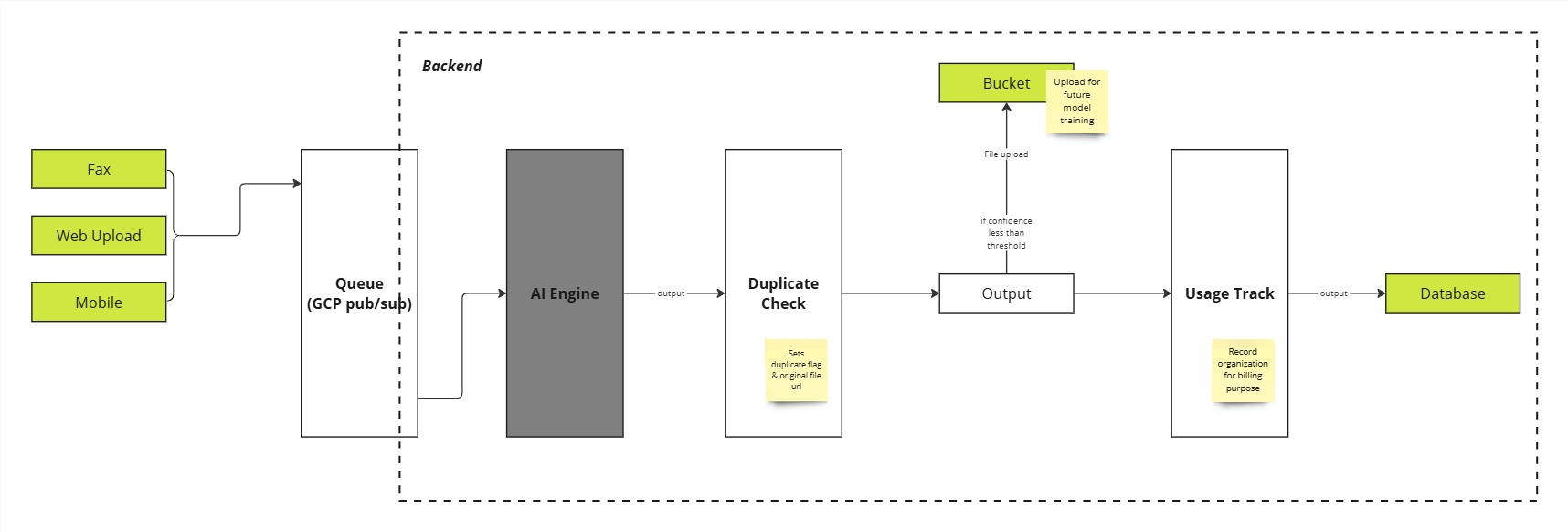
Backend:
Results
The AI engine is robust, effectively handling documents with high noise levels, handwriting, and information scattered across multiple pages.It achieves an accuracy of over 85% on client documents, significantly improving from the previous version's ~60% and surpassing general-purpose models like GPT-4o, which performs at around ~75%.
The AI engine processing time for a single page file is about ~6s, with ~4s for each additional page. End-to-end processing time (from file upload to seeing output on UI), is about ~10s for a single page file.
Single Pilot Cockpit
Computer Vision, Mechatronics, Python, C
2023 (11 months)
5
NUS Innovation & Design Program
Partnered with Boeing to explore single pilot cockpit operations in commercial aircrafts.
Overview
Designed and developed a proof-of-concept solution for a single pilot cockpit using smart glasses and an automated cockpit switch system. The solution handles tasks typically performed by a co-pilot, such as executing checklists, error detection, and ensuring pilot alertness.Contributions
- Engaged with Boeing engineers and pilots to understand current cockpit procedures
- Designed functionality of smart glasses and automated switches:
- Overlays critical information such as checklist items and warnings in the pilot's field of view
- Tracks the pilot's blinking pattern and wakes them with vibrations if their eyes remain closed for an extended period
- Uses computer vision to detect errors in pilot's actions and alert them accordingly
- Automated switches execute tasks upon pilot approval while maintaining manual override capability as backup
- Sourced and integrated all electronic components, including a mini OLED display, vibration motor, motion sensor, video camera, buttons & switches, rotary motors, and microcontrollers
- Developed all functionality of smart glasses and automated switches including microcontroller algorithm, computer vision, and OLED display content (Yolov8, Python, Arduino)
Results
The solution offloads lower-level tasks, such as manually flipping switches and looking down at cockpit instruments. This helps the pilot to focus on higher level tasks like decision making and monitoring the flight path, thus improving the pilot's situational awareness and flight safety.Robotics Car
Robotics, Real-Time Operating System, C
2023 (3 months)
5
NUS Computer
Engineering
NUS Computer Engineering course on Real-Time Operating Systems.
Overview
In this project, teams are tasked with building a remote-controlled robotic car capable of navigating an obstacle course as quickly as possible. Each car is built using similar components, with the primary differentiating factor being the software and operating system developed by each team. The cars require essential functionalities, including playing music, flashing lights, and maneuvering abilities. The car uses an ESP32 for wireless control and a main microcontroller (FRDM KL25Z), which contains an ARM Cortex M0+ processor. This processor runs a Real-Time Operating System (Keil RTX), programmed with threads and interrupts in C.Contributions
- Co-designed the OS architecture
- Recommended switching from HTTP to UDP protocol for control signals, reducing latency
- Implemented the flashing light functionality requirement
- Designed and procured a custom laser-cut acrylic chassis frame to enhance vehicle dynamics
- Drove the car during final obstacle course run to obtain the team's timing
Results
The thoughtful design and implementation of our Real-Time Operating System led to exceptionally low control latency. Additionally, the joystick control system, developed by a team member, provided finer control over the car's movements compared to traditional button controls. This responsiveness and ease of control enabled our team to achieve the fastest lap time in our lab class by a comfortable margin.Robot Autonomous Exploration
Robotics, C++
2023 (3 months)
10+
Defence Science and Technology Agency
Developed robotics solutions for military applications.
Overview
Using robots to perform high-risk military activities, such as urban exploration, greatly lowers the risk exposure of soldiers and can save many lives.Contributions
- Developed GPS-based localization capability by interfacing with the robot's onboard GPS module
- Developed a pre-exploration stage where the robot autonomously moves into the area to be explored
- Automated exploration procedure, including the transitions between localisation, pre-exploration, and exploration stages
Results
Given the GPS coordinates of an area to explore, and the robot starting from any arbitrary location, it can localise itself, move into the area to explore, and begin exploration, all in one step and autonomously.Drone Autonomous Navigation
Computer Vision, Python
2023 (3 months)
2
Defence Science and Technology Agency
Developed robotics solutions for military applications.
Overview
Drones are a great way to deliver small items to destinations in buildings, particularly those on higher floors. The addition of user assistance greatly reduces the difficulty of manoeuvering drones in cramped urban areas, making it accessible for soldiers to operate without extensive drone training.Contributions
- Designed overall system process and structure
- Trained a computer vision (Yolov8 object tracking) model on building windows
- Integrated the computer vision model with a test drone
Results
Semi-automated navigation: A soldier manually pilots a drone towards a building until the drone camera detects the windows (typically from 20 meters away). The soldier selects the appropriate destination window, and the drone autonomously flies to the window.RC Tank
Robotics, Real-Time Operating System, C
In progress (since 2024)
1
Personal Project